Tomorrow, Today.
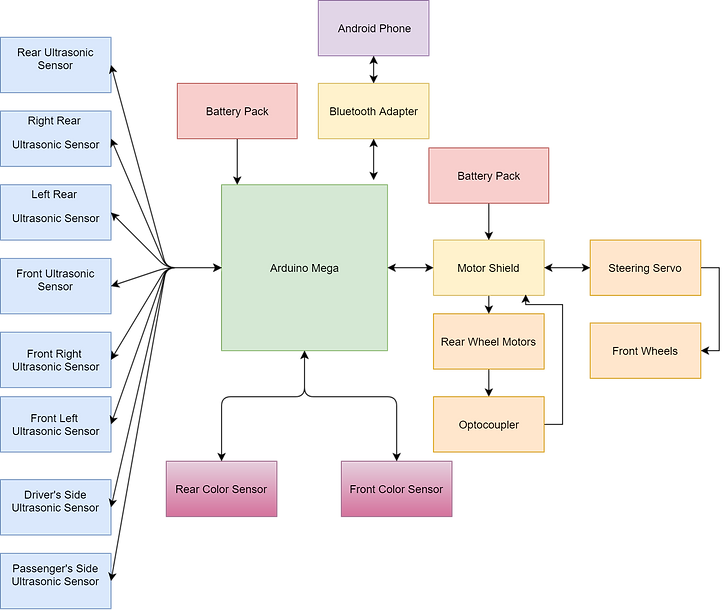
Parking Block Diagram
.png)
Rear-Right, Rear-Left, Rear, Passenger Side, Front, Driver Side, Front Left, and Front Right Ultrasonic Sensors: These sensor will be connect to the Adriuno Mega and will be used to determine the distance the car is from an object.
Color Sensors: The color sensors will be used to detect the white lines of a parking space. They will be placed on all two areas of the car: The front and rear of the car. When the white line is detected it will let the car know to stop. Afterwards, the car will move in the correct direction to clear the white parking line. This is incredibly useful in case there is no car for the ultrasonic sensors to detect.
Arduino Mega: The Arduino Mega is the brain of the self parking system. Everything that is used in this project will somehow attach to the Arduino since it will be the item that processes all of the information. The information it will mainly process will come from the ultrasonic sensors, but it will also need to communicate, through an H-bridge, to the Steering Servo and front wheels so the car can change directions and position.
Battery Pack: The battery pack will supply the self parking system with enough power to operate.
Motor Shield: The motor shield will be used to control the Steering servo as well as the wheels. This will be placed on the arduino and will allow us to easily program the servo and wheels. The motor shield also has two H-bridges attached to it which will allow for negative and positive voltage to change the direction of the wheels and servo.
Steering Servo: The steering servo will obtain its voltage from the arduino, through the H-bridge. The servo will allow the wheels to move right or left depending upon any obstacles the ultrasonic sensors detect.
Rear Wheel motor: The front wheel motor will obtain its voltage from the arduino, through the H-bridge as well. The arudino will tell the motor if it needs to go forward or reverse depending upon the parking situation as well as how close to an obstacle the car is.
Bluetooth: this will be used to communicate with the Arduino. The Android Phone will send a command to the Arduino, SELFIE will perform the procedure. The information that the Arduino will be sending back to the phone is the initial handshake and if it's connected.